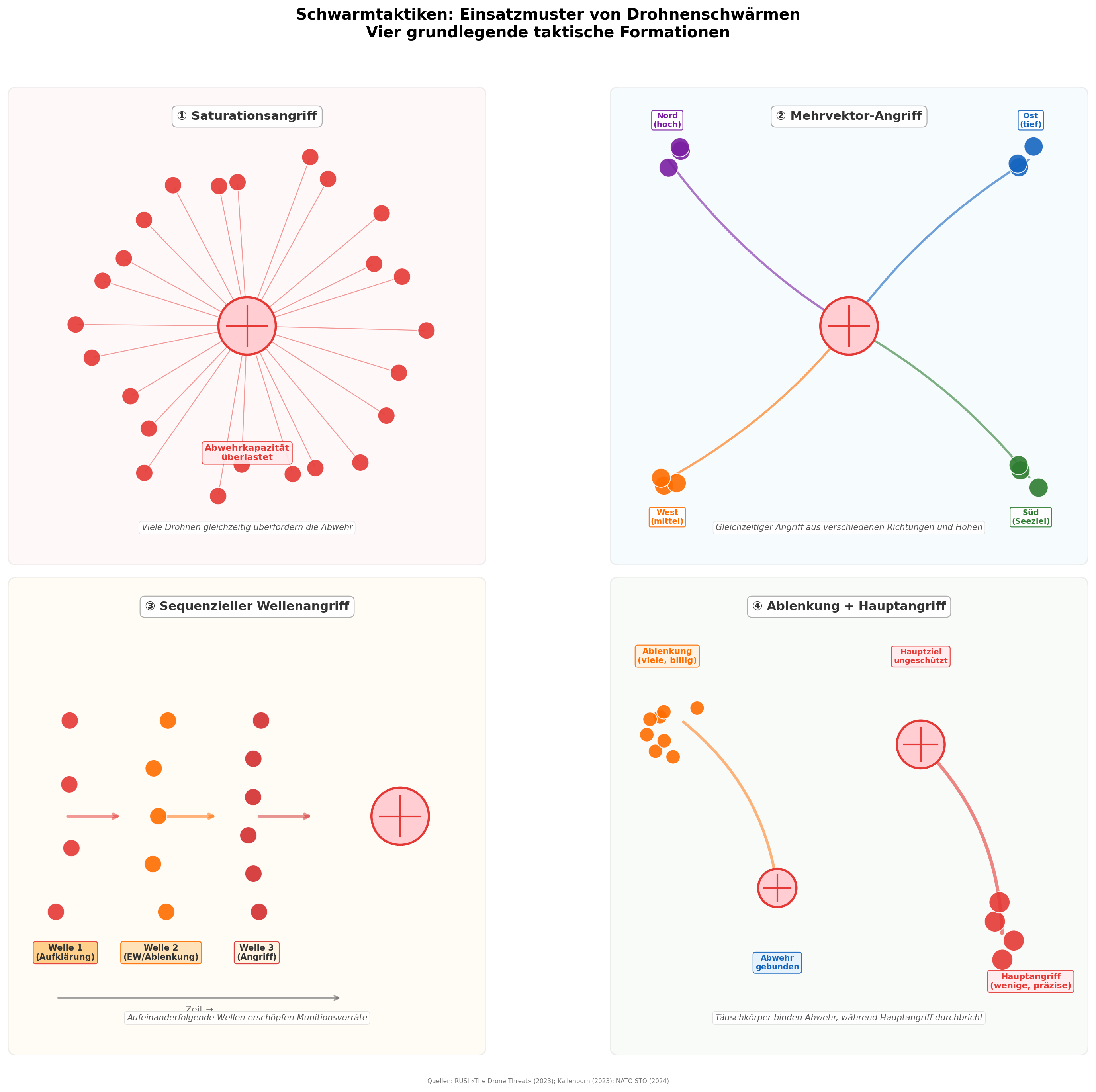
¶ Schwarmtaktiken und Sättigungsangriffe
ℹ️ Questa pagina è stata tradotta automaticamente dal tedesco e deve ancora essere revisionata.
Zur deutschen Version
Stato: marzo 2026. Tutti i dati si basano su fonti accessibili al pubblico.
¶ Introduzione
Sättigungsangriffe — der gleichzeitige Einsatz einer Vielzahl von Minacce, die die Kapazität der Verteidigung übersteigen — sind kein neues Konzept. Bereits im Kalten Krieg plante die sowjetische Marine koordinierte Anti-Schiff-Raketenangriffe auf Trägerkampfgruppen. Was sich fundamental verändert hat, ist die Zugänglichkeit: Durch die Verfügbarkeit kostengünstiger Drohnen können heute auch nicht-staatliche Akteure Sättigungsangriffe durchführen. Kooperative Schwarmlogik mit KI-Unterstützung hebt diese Bedrohung auf ein qualitativ neues Niveau.
¶ Kooperative Schwarmlogik und dynamische Zielzuweisung
¶ Vom Einzelsystem zum Schwarm
Ein einzelnes UAS ist eine taktische Nutzlast. Ein Schwarm — definiert als eine Gruppe von drei oder mehr kooperierenden UAS unter gemeinsamer Steuerung — ist ein strategisches Werkzeug. Der entscheidende Unterschied liegt in der Emergenz: Die kollektive Fähigkeit des Schwarms übersteigt die Summe seiner Einzelteile [1].
Moderne Schwarmarchitekturen basieren auf drei Grundprinzipien:
-
Dezentrale Entscheidungsfindung: Jedes UAS verfügt über lokale Regeln und Entscheidungsalgorithmen. Es gibt keinen einzelnen Ausfallpunkt (Single Point of Failure). Fällt ein Element aus, rekonfiguriert sich der Schwarm automatisch.
-
Kooperative Aufgabenteilung: Innerhalb eines Schwarms übernehmen einzelne Drohnen spezialisierte Rollen — Aufklärung (Scouts), Täuschung (Decoys), Störung (Jammers) oder Angriff (Strikers). Diese Rollen können dynamisch gewechselt werden.
-
Kollektive Wahrnehmung: Sensordaten werden zwischen den Schwarmteilnehmern geteilt, wodurch ein gemeinsames Lagebild entsteht, das umfassender ist als die Sicht jedes einzelnen Elements.
¶ Dynamische Zielzuweisung
Fortgeschrittene Schwarmlogik ermöglicht die automatisierte Zielzuweisung nach taktischen Prioritäten. Ein Schwarm kann:
- Luftverteidigungssysteme als Hochwertziele identifizieren und priorisieren
- Feuerleitradare durch Störer saturieren, während Angriffsdrohnen aus einem anderen Vektor anfliegen
- Automatisch Ziele an verfügbare Schwarmteilnehmer verteilen, um Redundanz zu vermeiden
- Ergebnisse der Effetto in Echtzeit auswerten und verbleibende Kräfte umlenken
Das Pentagon-Programm Replicator zielt auf den Einsatz Tausender kostengünstiger, autonomer Drohnen ab, mit einer Finanzierung von 500 Millionen US-Dollar für das Fiskaljahr 2024. Die zentralen technologischen Stossrichtungen sind Autonomous Collaborative Teaming (ACT) und Opportunistic Resilient Network Topology (ORIENT) [2].
In der Ukraine hat die Software Swarmer koordinierte Operationen von 3 bis 25 Drohnen pro Mission ermöglicht, mit über 100 dokumentierten Kampfeinsätzen bis Ende 2025 [2].
¶ Magazine Depletion als operative Strategie
¶ Konzept
Magazine Depletion — die systematische Erschöpfung der Abfangmunition des Verteidigers — ist die logische Konsequenz des ungünstigen Costi-Austausch-Verhältnisses. Sie wird als bewusste operative Strategie eingesetzt, nicht als Nebeneffekt.
¶ Durchführung
Ein typisches Szenario für Magazine Depletion umfasst mehrere Phasen:
Phase 1 — Aufklärung: Elektronische Aufklärung identifiziert die Positionen und Tipoen der gegnerischen Luftverteidigung. Die Emission von Feuerleitradaren verrät Standorte und Sistematypen.
Phase 2 — Provokationsangriff: Costigünstige Drohnen oder Täuschkörper werden eingesetzt, um den Verteidiger zur Raketenverschwendung zu zwingen. Jede verschossene Abfangrakete verschlechtert die Bereitschaft.
Phase 3 — Munitionsausdünnung: Wiederholte Wellen billiger Minacce zwingen den Verteidiger, seine teureren Abfangmittel einzusetzen. Ein Patriot-Launcher mit 16 Raketen kann durch einen Schwarm von 50 Shahed-Drohnen theoretisch innerhalb von Minuten geleert werden.
Phase 4 — Entscheidender Schlag: Sobald die Abfangkapazität erschöpft oder geschwächt ist, folgt der Angriff mit leistungsfähigeren Sistemin — Marschflugkörpern, ballistischen Raketen oder Hyperschallwaffen.
Russland hat diese Strategie im Ukraine-Krieg systematisch angewandt: Shahed-Drohnen werden in Wellen vorausgeschickt, um die ukrainische Luftverteidigung zu binden und Abfangraketen zu verbrauchen, bevor Marschflugkörper wie die Kh-101 oder Kalibr nachfolgen [3].
¶ Gegenstrategien
Die Antwort auf Magazine Depletion liegt in der Diversifizierung der Abwehrmittel:
- Costigünstige kinetische Abwehr: Abfangdrohnen, 30-mm-Kanonen (z. B. Gepard-Flugabwehrpanzer)
- Gerichtete Energie: Hochenergielaser (z. B. DragonFire, HELSI) mit Costi von unter 15 US-Dollar pro Schuss
- Elektronische Kampfführung: Störsender gegen Funk- und GNSS-gesteuerte Drohnen
- Mikrowellenwaffen (HPM): Breitflächige Neutralisierung von Elektronik
¶ Counter-Countermeasures: Wie Angreifer auf Abwehr reagieren
Die Bedrohung entwickelt sich parallel zur Verteidigung weiter. Die wichtigsten Counter-Countermeasures (CCM):
¶ KI-gestützte Navigation
Autonome Zielfindung mittels maschinellem Lernen ermöglicht es Drohnen, auch ohne externe Navigationsunterstützung (GPS, GLONASS) ihr Ziel zu erreichen. Bilderkennungsalgorithmen identifizieren Ziele anhand von Form, Infrarotsignatur oder gespeicherten Referenzbildern. Dies macht GPS-Störung als Abwehrmassnahme teilweise wirkungslos [4].
¶ Optische Zielführung
Fortgeschrittene Loitering Munition nutzt elektrooptische und Infrarotsensoren für die Endphasenlenkung. Die israelische Harop und die neueren Lancet-Varianten verfügen über Lock-on-after-Launch-Fähigkeit: Der Operator oder ein KI-Algorithmus wählt das Ziel erst im Anflug aus. Gegen solche Sistemi sind elektromagnetische Gegenmassnahmen nur begrenzt wirksam.
¶ Inertialnavigation (INS)
Hochwertige MEMS-Trägheitsnavigationssysteme (Micro-Electro-Mechanical Sistemas) werden zunehmend kleiner und günstiger. Eine mit INS ausgestattete Drohne kann nach initialem GPS-Fix autonom weiterfliegen — selbst wenn das GPS-Signal anschliessend gestört wird. Die Genauigkeit nimmt über die Zeit zwar ab (INS-Drift), reicht aber für Ziele in 10–30 km Entfernung häufig aus.
¶ Glasfasersteuerung
Wie im Kapitel Klassifizierung der Minacce dargelegt, eliminiert die Glasfasersteuerung die Verwundbarkeit durch elektronische Kampfführung vollständig. Eine glasfasergelenkte Drohne kann weder gestört noch gekapert werden — sie kann nur physisch abgefangen oder zerstört werden [5].
¶ Adaptive Flugrouten
KI-gesteuerte Schwärme passen ihre Flugrouten in Echtzeit an erkannte Abwehrpositionen an. Erkennt ein Schwarmteilnehmer ein aktives Feuerleitradar, wird die Information geteilt und der Schwarm weicht kollektiv aus oder teilt sich auf, um aus mehreren Vektoren gleichzeitig anzugreifen.
¶ Auswirkungen auf die Verteidigungsplanung
Die Kombination von Schwarmtaktiken, Magazine Depletion und Counter-Countermeasures erzeugt ein Bedrohungsumfeld, das traditionelle Luftverteidigungskonzepte überfordert. Die Implikationen sind klar:
- Kill-Chain-Geschwindigkeit: Die Entscheidungsschleife (Sensor → Entscheidung → Effektor) muss schneller sein als die Angriffssequenz. Dies erfordert KI-gestützte Automatisierung.
- Wirkmittel-Diversität: Kein einzelner Effektortyp reicht aus. Die Kombination aus kinetisch, elektromagnetisch und gerichtet-energetisch ist unabdingbar.
- Skalierbare Produktion: Die Abwehr muss industriell skalierbar sein. Munition, die Millionen pro Stück kostet und Annoe zur Herstellung benötigt, kann dem Tempo eines Sättigungsangriffs nicht standhalten.
¶ Fonti
[2] Drone Wars: Developments in Drone Swarm Technology — Defense Security Monitor
[3] Drone Saturation: Russia's Shahed Campaign — CSIS
[4] The Russia-Ukraine Drone War: Innovation on the Frontlines and Beyond — CSIS
[5] Fiber-Optic Drones in Ukraine: Evolution, Applications, and Impact — TS2 Tech
[6] Competitive Electronic Warfare in Modern Paese Operations — RUSI