¶ Sensortechnologien
ℹ️ Questa pagina è ina translaziun automatica dal tudestg e sto anc vegnir controllada.
Zur deutschen Version
Stadi: mars 2026. Tut las datas sa basan sin funtaunas accessiblas al public.
¶ Introducziun
Die Detektion, Klassifizierung und Verfolgung von Drohnen und Marschflugkörpern erfordert ein Zusammenspiel verschiedener Sensortechnologien. Keine einzelne Technologie kann alle Smanazzas unter allen Bedingungen zuverlässig erfassen. Die Herausforderung besteht darin, Ziele mit extrem kleinem Radarquerschnitt (unter 0,01 m² bei Mikrodrohnen), niedriger Geschwindigkeit und geringer Wärmeabstrahlung in einem Umfeld voller Clutter (Vögel, Wetterereignisse, ziviler Flugverkehr) zu erkennen [1].
Moderne Luftverteidigungssysteme setzen daher auf Multisensor-Architekturen, bei denen verschiedene Technologien komplementär eingesetzt werden. Dieser Artikel beschreibt die wichtigsten Sensortechnologien und ihre jeweiligen Stärken und Grenzen.
¶ AESA-Radar (Active Electronically Scanned Array)
¶ Funktionsweise
AESA-Radare verwenden Hunderte bis Tausende von einzeln ansteuerbaren Sende-/Empfangsmodulen (T/R-Module), die auf einer planaren Antenne angeordnet sind. Durch elektronische Phasenverschiebung kann der Radarstrahl ohne mechanische Bewegung in Mikrosekunden geschwenkt werden. Dies ermöglicht die gleichzeitige Verfolgung Hunderter Ziele in verschiedenen Richtungen [2].
¶ GaN-Technologie
Die neueste Generation von AESA-Radaren verwendet Galliumnitrid (GaN)-Halbleiter anstelle von Galliumarsenid (GaAs). GaN bietet eine 3–5-fach höhere Sendeleistung pro Modul, bessere Wärmeableitung und grössere Bandbreite. Dies steigert die Detektionsreichweite insbesondere gegen Ziele mit kleinem RCS erheblich [2].
Relevante Sistems:
- Rheinmetall AESA-Radar (X-Band) — optimiert für C-UAS im VSHORAD-Bereich
- CEAFAR (CEA Technologies) — Multifunction-Radar für IRIS-T SLM
- AN/MPQ-65A (Raytheon) — Patriot-Feuerleitradar mit GaN-Upgrade
¶ Mikro-Doppler-Analyse
Eine Schlüsseltechnologie für die Drohnendetektion ist die Mikro-Doppler-Analyse. Rotierende Rotorblätter einer Drohne erzeugen charakteristische Doppler-Signaturen, die sich von denen eines Vogels oder anderer Flugobjekte unterscheiden. Moderne Signalverarbeitungsalgorithmen können anhand dieser «Mikro-Doppler-Fingerabdrücke» Drohnen von Vögeln unterscheiden — eine essenzielle Fähigkeit zur Reduktion von Falschalarmen [3].
¶ Passive RF-Sensoren
¶ Funktionsweise
Passive RF-Sensoren (Radiofrequenz) lauschen auf elektromagnetische Emissionen, ohne selbst zu senden. Sie erfassen die Steuersignale zwischen Drohne und Bodenstation (typischerweise im 2,4-GHz- oder 5,8-GHz-Band) sowie Videorückkanäle. Durch Peilung aus mehreren Richtungen (Triangulation) kann der Standort sowohl der Drohne als auch des Operators bestimmt werden [4].
¶ Stärken und Grenzen
Passive RF-Sensoren sind kostengünstig, energieeffizient und operieren verdeckt, da sie keine eigene Strahlung emittieren. Sie sind besonders wirksam gegen ferngesteuerte Drohnen mit aktiver Funkverbindung. Ihre grösste Schwäche: Gegen autonom fliegende Drohnen (GPS-Wegpunkt-Navigation ohne Funkverbindung) sind sie blind [4].
Relevante Sistems:
- Rohde & Schwarz ARDRONIS — Drohnendetektion und -peilung
- Dedrone DroneTracker — Multiband-RF-Sensor für urbane Umgebungen
- Thales SQUIRE — Passives RF-Aufklärungssystem
¶ EO/IR-Sistems (Elektro-Optisch / Infrarot)
¶ Funktionsweise
EO/IR-Sistems kombinieren hochauflösende Kameras im sichtbaren Spektrum mit Infrarot-Sensoren (kurzwellig SWIR, mittelwellig MWIR und langwellig LWIR). Sie bieten präzise Zielverfolgung und visuelle Identifizierung, was besonders für die positive Zielidentifikation (Positive ID) vor dem Waffeneinsatz essenziell ist [5].
¶ Leistungsspektrum
- Tagkameras (EO): Hohe Auflösung, Distanzan bis 20 km für grössere Ziele, wetterabhängig
- Wärmebildkameras (IR): Detektion der Motorwärme und Abgasfahne, funktioniert bei Nacht und eingeschränkt bei Nebel
- Laser Range Finder: Präzise Entfernungsmessung für die Feuerleitung
EO/IR-Sistems sind als primäre Feuerleit-Sensoren in Sistemsn wie Skynex, RBS 70 NG und Gepard integriert. Ihre Schwäche liegt in der Wetterabhängigkeit — bei starkem Regen, Nebel oder Schnee sinkt die Leistung deutlich.
¶ Akustische Sensornetzwerke
¶ Funktionsweise
Akustische Sensoren erfassen die charakteristischen Geräusche von Drohnenmotoren und -propellern mithilfe von Mikrofonarrays. Durch Beamforming und Kreuzkorrelation können Richtung und Entfernung der Schallquelle bestimmt werden. Mehrere vernetzte akustische Sensoren bilden ein Netzwerk, das grossflächige Überwachung ermöglicht [6].
¶ Ukraine-Modell
Die Ukraine hat ein innovatives akustisches Frühwarnnetzwerk entwickelt, bei dem Hunderte einfacher, IoT-basierter akustischer Sensoren über das Mobilfunknetz verbunden sind. Diese «Acoustic Listening Posts» detektieren anfliegende Shahed-Drohnen anhand ihres charakteristischen Motorengeräuschs und übermitteln die Peilung an das zentrale Luftlagebild. Das Sistem ergänzt die Radarerfassung und ist besonders wirksam in Gebieten, wo Radarlücken bestehen [6].
¶ Stärken und Grenzen
- Stärken: Funktioniert bei jedem Wetter, geringe Custs, passiv (keine Emissionen), erkennt auch tieffliegende Ziele hinter Geländemasken
- Schwächen: Begrenzte Distanza (typisch 500 m – 2 km), anfällig für Umgebungslärm, keine präzise Autezzanbestimmung
¶ LIDAR (Light Detection and Ranging)
¶ Funktionsweise
LIDAR-Sistems senden Laserpulse aus und messen die Reflexionen. Sie erzeugen hochpräzise dreidimensionale Punktwolken der Umgebung und können Objekte mit sub-metrischer Genauigkeit lokalisieren. Für die Drohnenabwehr sind insbesondere Doppler-LIDAR-Sistems relevant, die die Geschwindigkeit bewegter Objekte messen [7].
¶ Einsatz in der Drohnenabwehr
LIDAR wird primär als ergänzender Sensor für die Kurzstrecken-Identifizierung eingesetzt. Die Technologie ist besonders nützlich, wenn eine positive Identifikation des Ziels vor dem Engagement erforderlich ist — etwa in urbanen Umgebungen, wo Fehlidentifikationen katastrophale Folgen hätten.
¶ Stärken und Grenzen
- Stärken: Hohe Auflösung und Genauigkeit, 3D-Zielerfassung, funktioniert bei Tag und Nacht
- Schwächen: Begrenzte Distanza (typisch unter 5 km), stark wetterabhängig (Regen, Nebel), hohe Custs, Augensicherheit
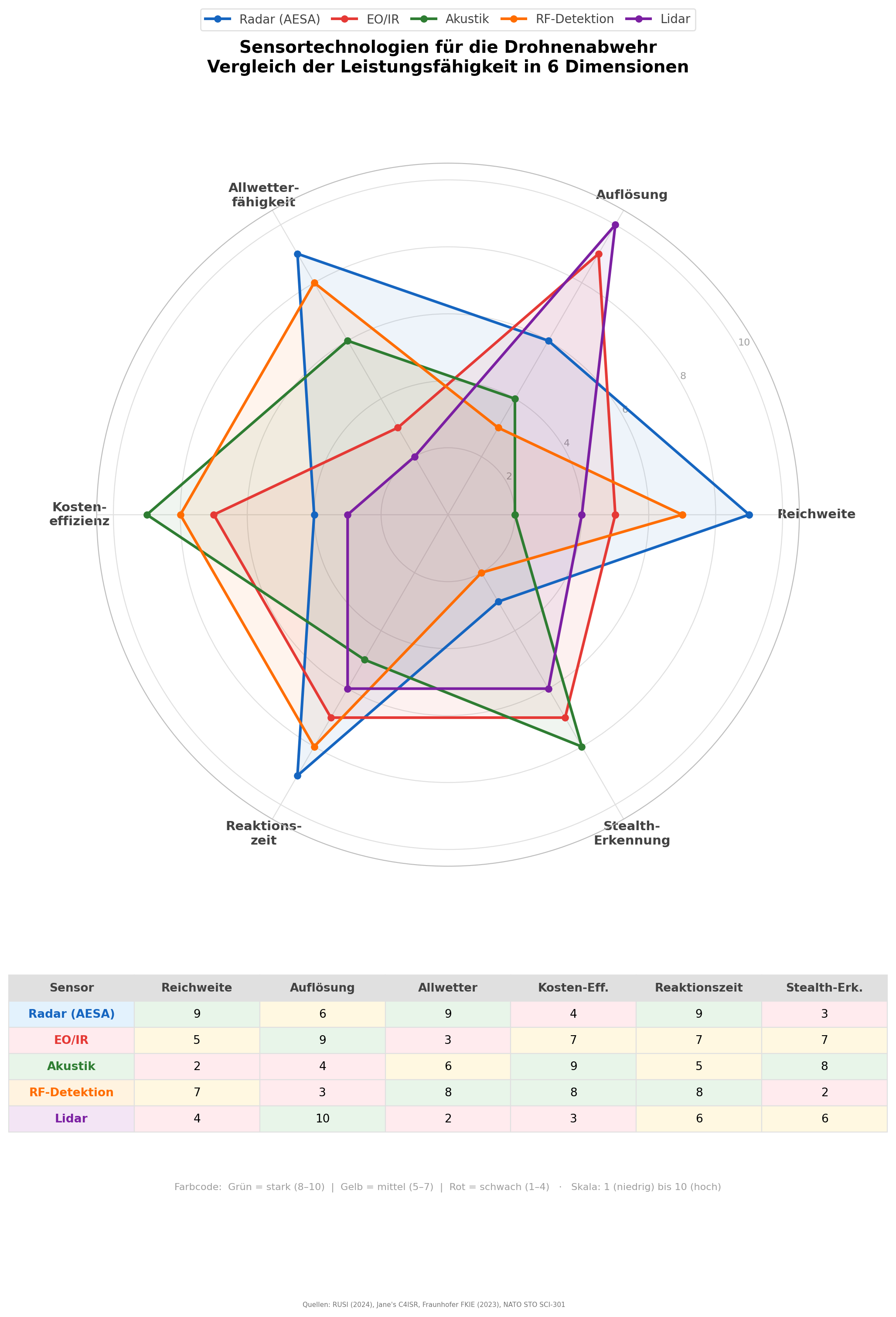
¶ Technologievergleich
| Technologie | Distanza | Stärken | Schwächen |
|---|---|---|---|
| AESA-Radar (GaN) | 1–300+ km | Grossreichweite, all-Wetter, Multitrack, Mikro-Doppler | Custs, Stromverbrauch, RCS-Untergrenze |
| Passive RF | 0,5–20 km | Passiv, ortung Operator, kostengünstig | Unwirksam gegen autonome Drohnen |
| EO/IR | 0,1–20 km | Visuelle ID, präzise Verfolgung, Nachtfähig (IR) | Wetterabhängig, begrenzte Distanza |
| Akustik | 0,5–2 km | Passiv, kostengünstig, hinter Geländemasken | Kurze Distanza, Umgebungslärm |
| LIDAR | 0,1–5 km | 3D-Erfassung, hohe Präzision | Wetterabhängig, kurze Distanza, Custs |
¶ Conclusiun
Keine Sensortechnologie allein kann das gesamte Bedrohungsspektrum abdecken. Die Zukunft liegt in der Multisensor-Fusion: AESA-Radar liefert Frühwarnung und grobe Zielverfolgung, passive RF-Sensoren identifizieren den Drohnentyp anhand seiner Steuersignale, EO/IR-Sistems ermöglichen die visuelle Bestätigung, und akustische Sensoren füllen Radarlücken im Tiefflugbereich. Die Orchestrierung dieser Sensoren erfolgt durch KI-gestützte Fusionsalgorithmen, die im nächsten Artikel behandelt werden.
¶ Funtaunas
[1] CSIS — Counter-Unmanned Aircraft Sistems Technology Guide
[2] Northrop Grumman — AESA Radar Technology
[3] IEEE — Micro-Doppler Signatures for Drone Classification
[4] Rohde & Schwarz — ARDRONIS Counter-UAS Solution
[5] Thales — Air Surveillance and Defence Sensors